Posted in旅行
2026春节旅程(重庆、腾冲)
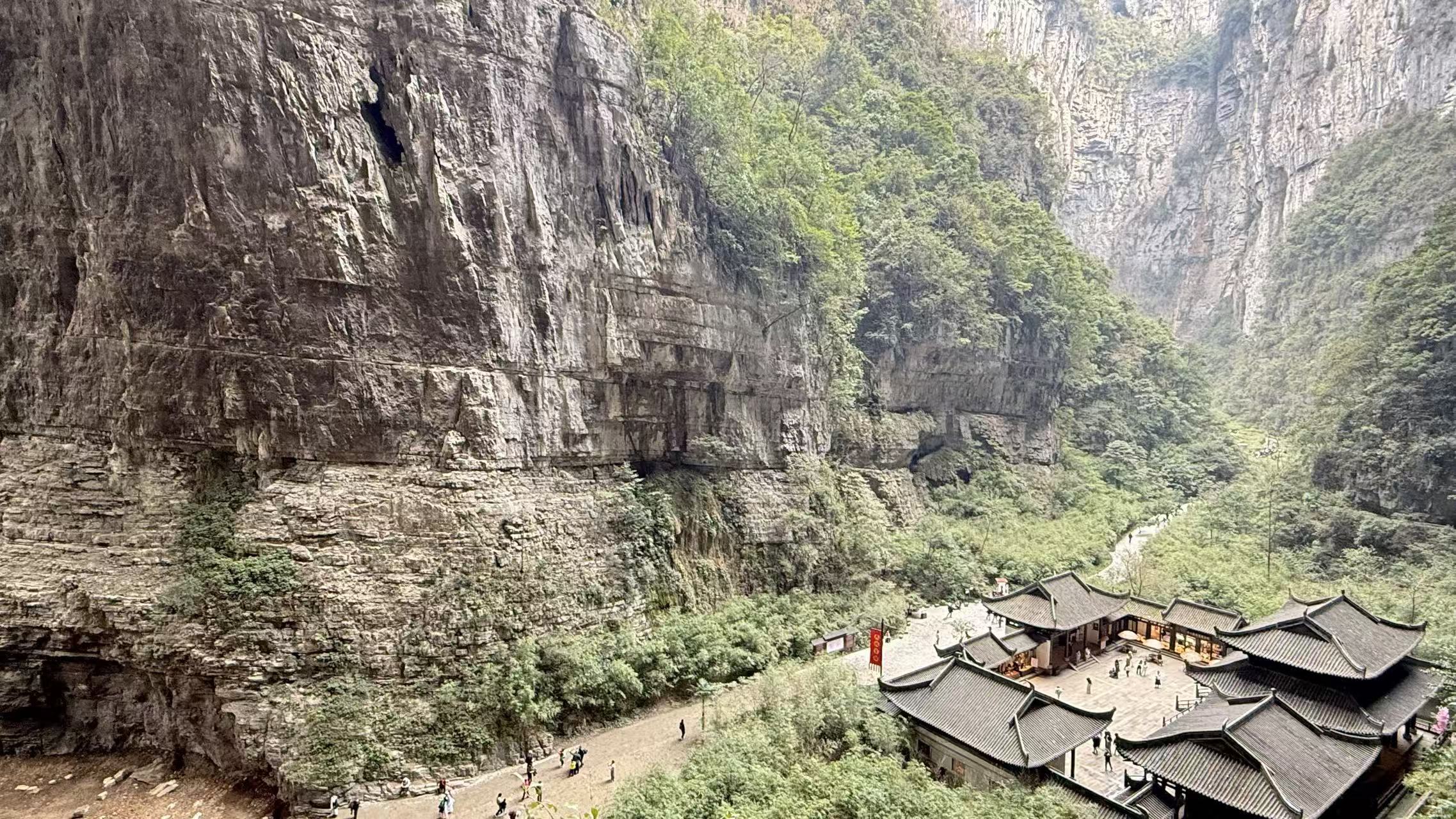
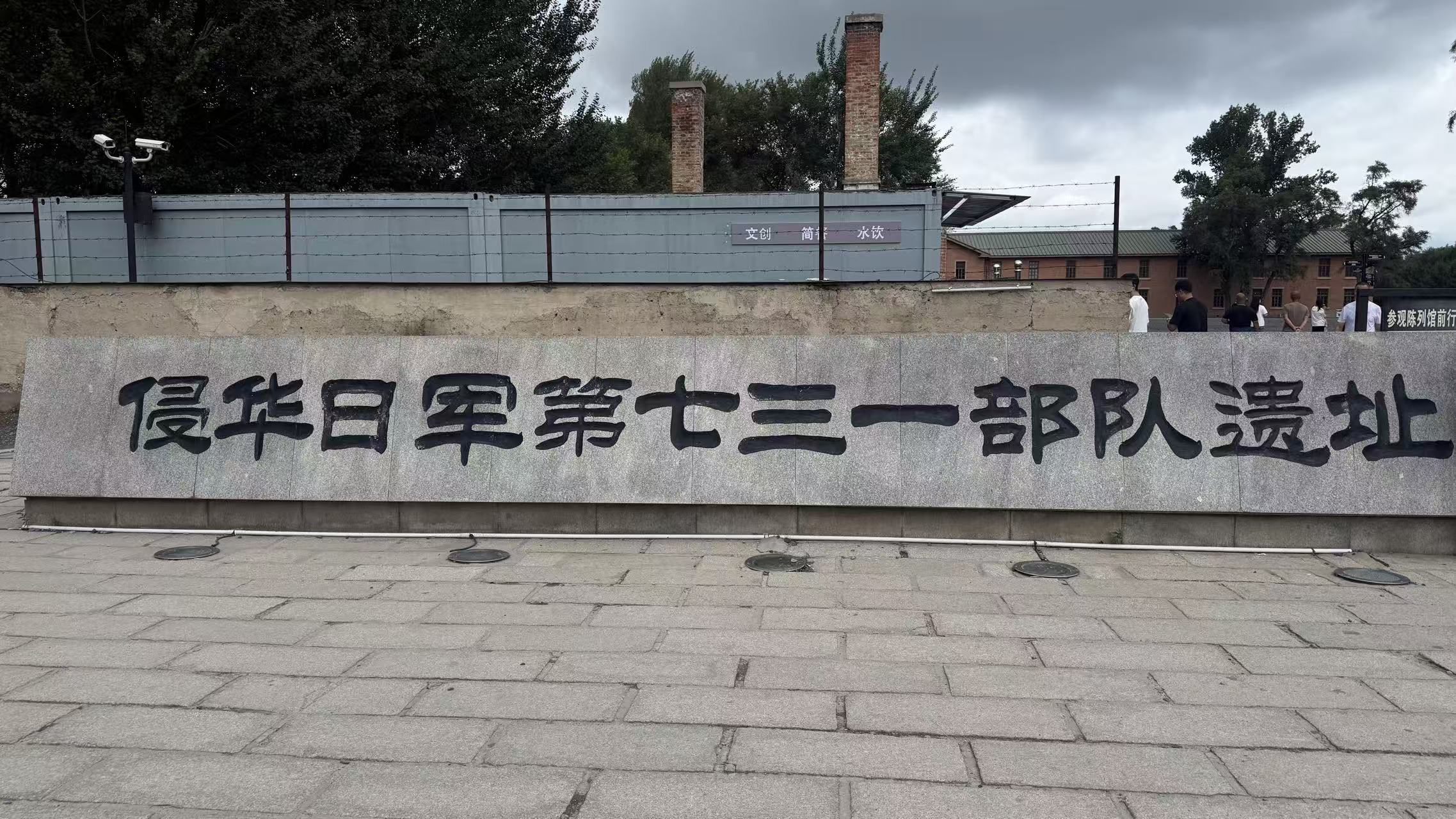
2026回云南腾冲 行程 日期 城市 交通方式 景点 2/12 重庆 CA1439, 地铁10号线转2号线 解放碑、洪崖洞 2/13 重庆 包车 天生三桥、龙水侠地缝、下浩里 2/14 重庆 打车 建川海疆博物馆、夜游两江 2/15 腾冲 CZ2179 2/21 保山/昆明 自驾保山, C346 2/22 昆明 G308 费用…
Knowledge derives from accumulation.